
www.mexicoindustrial.net
12
'10
Written on Modified on
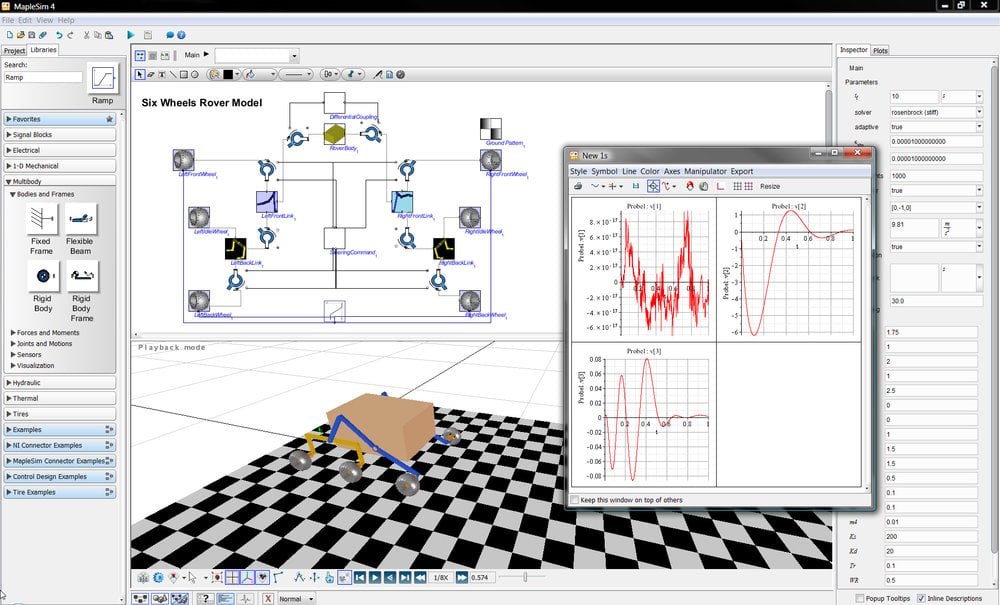
MapleSim se utiliza para desarrollar rápidamente un modelo multidominio de alta fidelidad de explorador robótico del espacio
La exploración planetaria sin tripulación es un tema central para muchas agencias de investigación del espacio exterior en todo el mundo. Para realizar la tarea de forma exitosa, se necesitan exploradores robóticos de autonomía avanzada. El Dr. Amir Khajepour, investigador y catedrático en Canadá sobre sistemas de vehículo mecatrónico y profesor de ingeniería en el Departamento de Ingeniería Mecánica y Mecatrónica en la Universidad de Waterloo (UW por sus siglas en inglés), trabaja junto con la Agencia del Espacio de Canadá (CSA, por sus siglas en inglés), Maplesoft y el Gobierno de Canadá a fin de desarrollar una solución integral de un sistema de manejo de exploradores autónomos. Con MapleSim, la base del modelo matemático del robot de seis ruedas fue desarrollada en solamente un mes, sin necesidad de escribir ni una sola ecuación.
La CSA tiene una larga historia en la aplicación de técnicas simbólicas para el modelado de robótica espacial. Han implementado estas técnicas en el diseño de numerosos robots espaciales desarrollados a través del Programa Espacial Shuttle y la Estación Espacial Internacional. Esta nueva iniciativa en UW está utilizando MapleSim, la última generación en tecnología de modelización simbólica, para desarrollar rápidamente modelos multidominio de alta fidelidad de los subsistemas del explorador.
El objetivo general del proyecto es diseñar un sistema de exploración que pueda llevar al robot desde un punto A hasta un punto B, teniendo en cuenta todas las posibles restricciones. Por ejemplo, cuál sería el camino a elegir para llegar a un lugar determinado con el menor riesgo posible, o, de otra forma, cuál sería el camino a tomar utilizando el mínimo de energía.
El primer paso es un proyecto de tres años para desarrollar el modelo del explorador inicial, incluyendo aspectos tales como la batería, la generación de energía solar, las condiciones del suelo y del terreno. En sus últimas etapas, el proyecto también incluirá una completa gama de testeo de fases de Hardware-in-the-Loop (HIL), utilizando un hardware de tiempo real y un software de National Instruments, con modelos que han sido desarrollados por MapleSim. Esto es muy importante para la optimización de los parámetros del sistema, que maximizarán la conservación mientras también se alcanzan otros objetivos.
“Con el uso de MApleSim, la base modelo del explorador fue desarrollada en un mes –dijo Dr. Khajepour.- Los beneficios de MapleSim son significativos al compararlos con los de otras herramientas tradicionales. Ahora tenemos el modelo matemático del robot de seis ruedas sin necesidad de escribir una sola ecuación. MapleSim pudo generar automáticamente un óptimo conjunto de ecuaciones para el sistema de exploración, lo cual es esencial en la fase de optimización.”
El Dr. Khajepour también se satisfizo por la interfaz gráfica de MapleSim. Con ella, se puede recrear muy fácilmente un diagrama en la pantalla utilizando componentes que representan el modelo físico. El diagrama resultante es muy parecido a lo que un ingeniero quizás dibujaría a mano. Por lo tanto, MapleSim puede transformar fácilmente los modelos en animaciones realísticas. Las mismas facilitan sobremanera la validación de la diagramación y ofrecen un buen panorama del comportamiento del sistema.
“La posiblilidad de ver el modelo, de ver sus partes móviles, es muy importante para un desarrollador –continuó el Dr. Khajepour.- Actualmente estoy optando por MapleSim en la mayoría de mis proyectos.”
El objetivo general del proyecto es diseñar un sistema de exploración que pueda llevar al robot desde un punto A hasta un punto B, teniendo en cuenta todas las posibles restricciones. Por ejemplo, cuál sería el camino a elegir para llegar a un lugar determinado con el menor riesgo posible, o, de otra forma, cuál sería el camino a tomar utilizando el mínimo de energía.
El primer paso es un proyecto de tres años para desarrollar el modelo del explorador inicial, incluyendo aspectos tales como la batería, la generación de energía solar, las condiciones del suelo y del terreno. En sus últimas etapas, el proyecto también incluirá una completa gama de testeo de fases de Hardware-in-the-Loop (HIL), utilizando un hardware de tiempo real y un software de National Instruments, con modelos que han sido desarrollados por MapleSim. Esto es muy importante para la optimización de los parámetros del sistema, que maximizarán la conservación mientras también se alcanzan otros objetivos.
“Con el uso de MApleSim, la base modelo del explorador fue desarrollada en un mes –dijo Dr. Khajepour.- Los beneficios de MapleSim son significativos al compararlos con los de otras herramientas tradicionales. Ahora tenemos el modelo matemático del robot de seis ruedas sin necesidad de escribir una sola ecuación. MapleSim pudo generar automáticamente un óptimo conjunto de ecuaciones para el sistema de exploración, lo cual es esencial en la fase de optimización.”
El Dr. Khajepour también se satisfizo por la interfaz gráfica de MapleSim. Con ella, se puede recrear muy fácilmente un diagrama en la pantalla utilizando componentes que representan el modelo físico. El diagrama resultante es muy parecido a lo que un ingeniero quizás dibujaría a mano. Por lo tanto, MapleSim puede transformar fácilmente los modelos en animaciones realísticas. Las mismas facilitan sobremanera la validación de la diagramación y ofrecen un buen panorama del comportamiento del sistema.
“La posiblilidad de ver el modelo, de ver sus partes móviles, es muy importante para un desarrollador –continuó el Dr. Khajepour.- Actualmente estoy optando por MapleSim en la mayoría de mis proyectos.”
