
www.mexicoindustrial.net
29
'14
Written on Modified on
"CAN FD" desafía a buses de campo y Ethernet industrial en maquinaria especializada
CAN FD ofrece la oportunidad de utilizar los sistemas CAN existentes y los conocimientos sobre CAN incluso cuando se necesita un mayor número nodos, unas velocidades de transferencia más altas y ciclos de mayor duración. Thomas Waggershauser, de HMS, explica cómo.
Posibles aplicaciones de CAN FD
La creciente demanda en cuanto a número de nodos, velocidades de transferencia y duración de los ciclos provoca cuellos de botella que no pueden asumir las limitaciones del CAN clásico (8 bytes de datos y velocidad de transmisión de datos de 1 Mbit/s). La velocidad de transmisión de los datos que depende de la ampliación de la red y la corta longitud de los datos para servicio y datos analógicos desempeñan aquí una función especialmente relevante.
En el uso diario, estas limitaciones se evitan a menudo por medio de compromisos. Así, la división del sistema en diferentes segmentos de red y en varias aplicaciones – o incluso en redes en paralelo – hace que las posibilidades de la tecnología existente se agoten constantemente, lo cual ha llevado a soluciones complejas y costosas por su configuración, ajuste y mantenimiento. En principio sería posible adoptar tecnologías de Ethernet industrial de altas prestaciones. El mayor nivel de inversiones que suele ser necesario y el cambio en las estructuras de los datos y en el modo de plantear la configuración, en particular para sistemas controlados con el tiempo, representan a menudo un reto considerable en redes extensas. Además, se necesita recurrir a herramientas para el desarrollo, instalación y mantenimiento, lo cual disuade a muchos usuarios a la hora de realizar una conversión completa.
Al mismo tiempo, existe el deseo de seguir aplicando los conocimientos existentes de manera útil.
Es aquí donde entra en escena CAN FD: CAN FD (CAN con velocidad de datos flexible) es una versión ampliada del bien conocido CAN "clásico" presentado por Bosch en 2012 y que amplía significativamente la velocidad de datos utilizable y la longitud de datos utilizable. Por otra parte, conserva los conceptos CAN ya probados y comprobados: el arbitraje basado en las identificaciones de mensajes, el envío de mensajes en función de eventos y el reconocimiento de los mensajes recibidos por medio del bit de reconocimiento.
Velocidad de datos mejorada
El reconocimiento de mensajes por parte de los receptores, utilizado en el CAN clásico, ofrece numerosas ventajas mediante la confirmación del éxito de la transmisión dentro del mensaje transmitido; los errores potenciales de transmisión se detectan rápidamente y los datos de pueden retransmitir de forma extremadamente rápida.
El arbitraje de los mensajes basado en el identificador de CAN también resulta ventajoso en aplicaciones de control al evitar colisiones durante la transmisión de datos y proporcionar cortos tiempos de latencia para mensajes de alta prioridad, incluso con cargas de bus más altas.
El inconveniente de los métodos utilizados es que durante el tiempo de muestreo debe existir el mismo nivel de bus en todos los nodos para evitar fallos. Según esto, un intervalo de bit debe ocupar el tiempo de propagación de señal suficiente entre los dos nodos más remotos de la red, incluyendo su activación de bus. El intervalo de bit, y por tanto la velocidad de los datos, dependen directamente de la extensión de la red; para una expansión de 40 m es posible alcanzar hasta 1 Mbit/s, pero para una expansión de 250 m cae incluso hasta 250 kBit/s.
Para incrementar significativamente la velocidad de los datos sin cambiar la tecnología de comunicaciones existente, CAN FD funciona con dos velocidades de bit diferentes. La "velocidad de arbitraje" para los comandos de control (incluyendo el arbitraje, el tipo de mensaje, la detección de fin y el reconocimiento) depende de la velocidad de propagación y por tanto de la extensión de la red. En cambio, también se usa opcionalmente una segunda "velocidad de bits de datos", para el contenido de los datos y la seguridad de los datos. En este punto temporal únicamente el transmisor del mensaje ocupa el bus, lo cual significa que no se necesita la realimentación directa dentro del tiempo de bit. La velocidad máxima de datos alcanzable depende, por tanto, únicamente de la característica de transmisión del medio de transmisión, y no de la propagación de señal. Las redes CAN FD permiten actualmente un uso productivo con 8 MBit/s, mientras que el CAN FD estándar permite hasta 15 Mbit/s. Esta velocidad de bit también se ha aprovechado con éxito en varios sistemas de test.
Las dos velocidades de datos se fijan independientemente entre sí en el controlador CAN FD utilizando dos registradores de sincronización de bit. La conmutación entre las dos velocidades de datos se realiza utilizando dos bits de control en el protocolo. El primer bit reservado hasta ahora se emplea como bit de la longitud ampliada de datos ("Extended Data Length", EDL) y define un mensaje CAN FD debido a su nivel recesivo. El cambio a la velocidad de bit real se lleva a cabo añadiendo un nuevo bit, el bit de cambio de velocidad de bit ("Bit Rate Switch", BRS), en el cual se adopta una mayor velocidad de bit en el tiempo de muestreo. El cambio en sentido contrario se realiza cuando se muestrea el bit de restricción CRC.
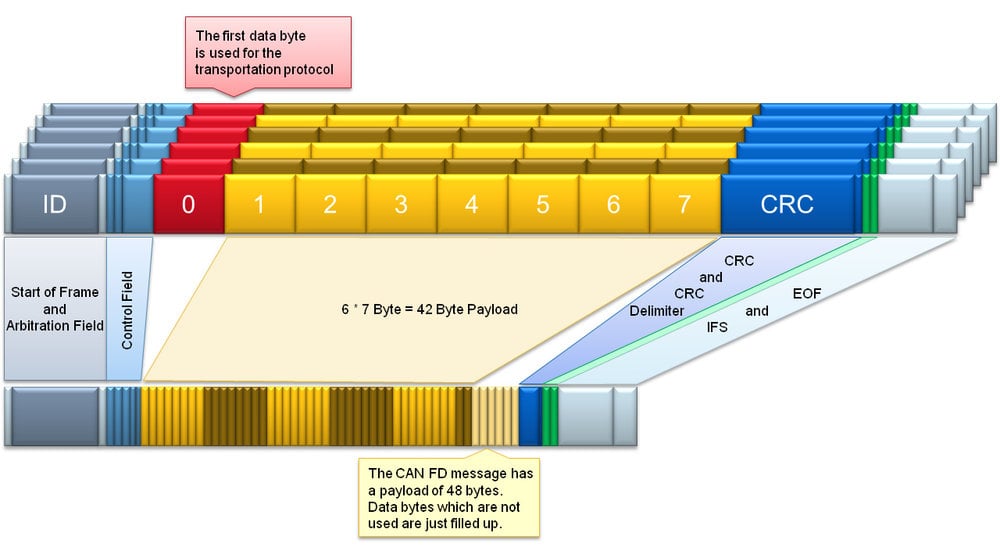
Imagen 1: Ventajas de CAN FD - 1. En este ejemplo se transmiten los datos de configuración, 42 bytes en total. En un CAN clásico se debe implementar un protocolo de transporte para transmitir todos los datos en mensajes de 8 bytes. El ejemplo se basa en un protocolo de transporte que solo emplea el primer byte de datos para controlar el flujo de datos. Esto significa que aún quedan hasta 7 bytes disponibles para cada mensaje CAN. Dependiendo del protocolo de transporte implementado puede que sea necesario añadir campos de datos para control. Por debajo de éste, por comparación, un solo mensaje CAN FD con 48 bytes de datos de usuario, que puede sustituir a los 6 mensajes de CAN clásico necesarios. Dado que los datos también se transmiten a una mayor velocidad de bit en el mensaje CAN FD mostrado antes, este mensaje CAN FD necesita bastante menos tiempo que los mensajes de CAN clásico. Además el uso de un solo mensaje CAN FD aquí simplifica significativamente la administración del flujo de datos.
Ampliación de los datos de usuario
Los datos de control aún se transmiten utilizando las conocidas velocidades de bit más bajas, limitando así las velocidades de datos alcanzables. Al incrementar el área de datos de usuario hasta 64 bytes se pueden enviar más datos en modo de transferencia rápida, lo cual aumenta efectivamente la velocidad de los datos.
El CAN clásico solo proporciona 8 bytes de datos, que ya no son suficientes para muchas aplicaciones de datos, como por ejemplo la transmisión de valores analógicos de alta precisión o el control de un robot multieje con sus diversos valores de codificación y comandos de accionamiento. Para ello es preciso añadir datos de servicio, lo cual ha reducido significativamente la efectividad debido a los protocolos de transporte necesarios para la transmisión de más de 8 bytes.
CAN FD ofrece actualmente la posibilidad de utilizar hasta 64 bytes de datos. Al hacerlo se pueden transmitir bloques de datos más grandes en un solo mensaje, especialmente en el caso de los datos de proceso, y se pueden controlar por completo dispositivos más complejos mediante un solo mensaje de proceso. Para los datos de servicio disminuye la necesidad de protocolos de transporte ya que a menudo solo se necesita un mensaje CAN FD para datos de configuración y similares.
Para evitar la una ampliación innecesaria de los datos de control, CAN FD también utiliza solo 4 bits para el código de longitud de datos; los valores 0 a 8 se toman directamente del CAN clásico. Los valores que hasta ahora habían quedado sin definir (9 a 15, p.ej., 1001 a 1111) se utilizan para las nuevas longitudes de datos ampliadas: además ahora están disponibles de 0 a 8 bytes, 12, 16, 20, 24, 32, 48 y 64 bytes para los datos de usuario. No es posible que haya longitudes de datos diferentes a éstas, es decir, las áreas no utilizadas se deben completar con "valores de relleno".
Además de la rápida transmisión del área de datos, puede aumentar en la práctica la velocidad de datos utilizable utilizando CAN FD y la duración del ciclo se puede reducir considerablemente. De esta forma, una red CAN FD con arbitraje de 500 kBit, transmisión de datos de 4 MBit y 64 bytes de datos puede alcanzar una velocidad de datos efectiva superior a 5 MBit/s.
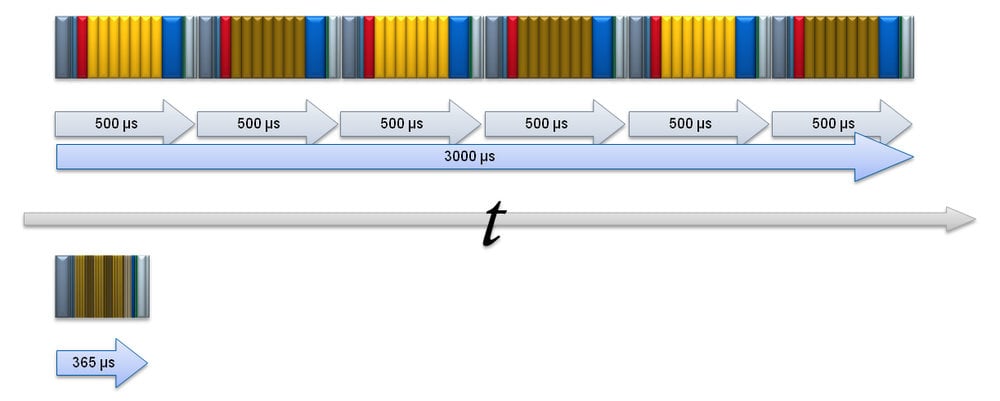
Imagen 2: Ventajas de CAN FD - 2. Esta figura muestra los mensajes CAN de la Fig. 1 en un solo cronograma: para el CAN clásico se presupone una velocidad de datos de 250 kBit/s. Para mensajes con 8 bytes de datos de usuario (1 byte para el protocolo de transporte y 7 bytes de datos de usuario en el ejemplo) y el máximo número posible de bits de relleno, un mensaje de CAN clásico necesita un tiempo de bus de unos 500 µs. Si el nodo transmisor es capaz de enviar los seis mensajes consecutivamente y sin retardo, el bus se bloqueará por completo durante tres milisegundos para transmitir los 42 bytes de datos de usuario. A modo de comparación, un mensaje CAN FD con 48 bytes de datos de usuario, una velocidad de arbitraje de 250 kBit/s y una velocidad de bis de datos de 2 MBit/s ocupa el bus tan solo durante 365 µs aproximadamente, también con el máximo número de bits de relleno. Esta transmisión más rápida de los datos también mejora el comportamiento de los sistemas CAN en tiempo real debido a sus tiempos de respuestas notablemente más reducidos, y al mismo tiempo aumenta la velocidad de los datos y reduce la complejidad de la administración de datos.
Capacidad en tiempo real
La combinación de múltiples paquetes de datos independientes en un solo mensaje significa que la administración de los datos se realiza de forma considerablemente más sencilla, puesto que ya no es necesario sincronizar los mensajes con el coste que ello representa. La rápida transmisión de paquetes de datos más grandes, por comparación con CAN clásico, permite multiplicar por 8 el volumen de datos transferido (64 bytes) más o menos en el mismo tiempo que sería necesario para un mensaje CNA clásico de 8 bytes. Los mensajes de alta prioridad se pueden transmitir de esta forma con mucha mayor rapidez y con una mejor capacidad en tiempo real.
Seguridad de datos
La seguridad de los datos es un tema importante. Pese al mayor tamaño del paquete de datos si se compara con el CAN clásico, CAN FD cumple los mismos requisitos por lo que respecta a la seguridad de los datos. Esto se logra, por ejemplo, recurriendo a claves de comprobación CRC más largas con algoritmos adaptados. Dependiendo del número de bytes de datos transmitidos se utiliza uno de los tres algoritmos CRC diferentes: la fórmula anterior de CRC para mensajes con hasta 8 bytes de datos, así como dos algoritmos avanzados con hasta 16 bytes de datos o más de 16 bytes de datos para mensajes. El algoritmo a utilizar por el controlador CAN se determina por medio del código de longitud de datos.
Para mejorar la seguridad de los datos se han implementado otras sugerencias. Como resultado de ello, el CRC en mensajes CAN FD siempre empieza con un bit de relleno; después de otros 5 bits se incluye un bit de relleno añadido. A diferencia de la regla de bits de relleno de CAN, es independiente de los valores del bit en los bits anteriores. Cada bit de relleno tiene el bit complementario del bit anterior.
Compatibilidad con versiones anteriores
Un inconveniente que tiene pasar de CAN a unos sistemas de comunicaciones más rápidas es el frecuente requisito para una conversión completa. Todos los participantes en CAN se deben adaptar al nuevo sistema, p.ej., EtherCAT. Como alternativa se puede ampliar el controlador de la máquina para que utilice múltiples redes heterogéneas. Ambos procedimientos ofrecen ventajas e inconvenientes. Al utilizar CAN FD, ahora existe una opción más "elegante": dado que los controladores CAN FD se pueden utilizar también como nodos CAN clásicos, todos los nodos de la red pueden sustituirse gradualmente por dispositivos aptos para CAN FD. En cuanto toda la red es apta para CAN FD se pueden aprovechar al máximo las ventajas de CAN FD. Esto resulta especialmente interesante para maquinaria especializada: también se utilizan aquí los participantes en la red que no son sustituibles por nodos disponibles libremente, en especial dispositivos especiales del cliente o dispositivos desarrollados internamente.
Herramientas disponibles para CAN FD
Existen diversas soluciones disponibles para el desarrollo de dispositivos y redes basados en CAN FD, especialmente tarjetas de interface PC-CAN FD para una amplia variedad de interfaces PC, por ejemplo las tarjetas IXXAT CAN-IB 500/600 PCIe de HMS Networks. Estas tarjetas CAN contienen una completa gama de paquetes de drivers para Windows, Linux y otros sistemas operativos, y facilitan la conexión a sistemas existentes y una rápida incorporación de paquetes de software existentes a redes CAN FD ya que ofrecen soporte a CAN y CAN FD.
Además de los interfaces de hardware con el software del driver correspondiente se necesitan herramientas de test y análisis para la implementación efectiva de CAN FD. A este respecto, HMS ofrecerá en breve una solución complete de altas prestaciones a un precio asequible a través de la versión apta para CAN FD del conocido IXXAT canAnalyser.
Entornos abiertos para CAN FD en el sector industrial
Además de las herramientas antes citadas, existen otros aspectos importantes para el uso de CAN FD en un entorno de producción. Es aconsejable aplicar protocolos muy estandarizados para su uso en aplicaciones industriales: en CiA (CAN in Automation) se está trabajando para convertir CANopen en CAN FD. Se espera que la especificación CANopen V5, que también contiene extensiones para CAN FD, esté disponible hacia mediados de este año.
Otro aspecto importante para el uso de CAN FD reside en los microcontroladores económicos y disponibles en grandes cantidades, con controladores CAN/CAN FD integrados. Los dispositivos disponibles hasta ahora utilizan principalmente FPGA con núcleos de IP CAN FD. Los microcontroladores con lógica CAN FD integrada son a menudo componentes de altas prestaciones con varios núcleos de CPU para dispositivos controladores complejos en vehículos. Hasta que estén disponibles los microcontroladores sencillos y económicos con soporte a CAN FD integrado, los sistemas basados en FPGA representan solución más flexible.
Expectativas
CAN FD amplía el área de aplicación de las soluciones basadas en CAN gracias a la significativa mejora de las velocidades de datos, una configuración sencilla y la conservación de las opciones de análisis conocidas de los buses de campo clásicos. La próxima disponibilidad de CANopen para CAN FD permite la implementación del nuevo sistema de red en el sector industrial y ofrece una solución efectiva para redes con una velocidad de datos de 100 kbit/s a 5 Mbit/s. Con la posibilidad de aprovechar las velocidades de datos más altas o el entorno de datos ampliado, de forma individual o combinada, el diseño flexible de CAN FD hace que resulte enormemente apropiado como sistema de bus de campo adaptable para maquinaria especializada.

Autor: Thomas Waggershauser.
Director de Ventas en IXXAT Automation GmbH, que forma parte del Grupo HMS

