
www.mexicoindustrial.net
10
'20
Written on Modified on
SISTEMA ROBOT MOBILE INCONTRA BIONICSOFTHAND 2.0
I recenti cambiamenti nell’industria richiedono un nuovo tipo di interazione tra persone, macchine e dati. In futuro, gli operatori così come i robot lavoreranno in maniera sempre più interconnessa. Festo ha lavorato a un sistema in grado di assistere nel lavoro ripetitivo o pericoloso senza essere un rischio per l’uomo. L’intelligenza artificiale gioca un ruolo fondamentale. Il BionicMobileAssistant è un prototipo di robot in grado di muoversi in modo indipendente e identificare oggetti, adattare la presa e lavorare con le persone.

BionicSoftHand 2.0: ispirato alla mano umana
La mano umana, con la sua combinazione unica di forza, destrezza ed elevate capacità motorie, è un vero miracolo della natura. Per permettere alla BionicSoftHand 2.0 di eseguire i movimenti della mano umana in maniera realistica, valvole compatte, sensori, elettronica e componenti meccanici sono stati integrati negli spazi più ristretti.
Dita e pollice opponibile sono realizzati da strutture a soffietto con camere d’aria circondate da un resistente tessuto a maglia. Questo rende la mano leggera, sensibile e in grado di adattarsi, mantenendo sempre la capacità di esercitare forze considerevoli. Le dita pneumatiche sono attivate da una compatta unità di valvole piezoelettriche, montate direttamente sulla mano.
BionicSoftHand con raggio d’azione aumentato
Per poter estendere la manovrabilità del pollice e indice rispetto alla prima versione di BionicSoftHand, gli sviluppatori hanno aumentato considerevolmente il raggio di rotazione laterale di entrambe le dita. Come risultato possono ora lavorare meglio assieme e afferrare oggetti con grande precisione. Grazie al polso stampato in 3D con due livelli di libertà, la mano può anche muoversi avanti e indietro così come a sinistra e a destra. Questo rende possibile afferrare oggetti anche con un raggio d’azione ristretto.

Le informazioni vengono elaborate da una rete neurale, che ha ricevuto un Training con l'aiuto di Data Augmentation.
Dita sensibili capaci di afferrare
Per aumentare la sensibilità delle dita, le camere d’aria contengono ognuna due elementi strutturali che fungono da ossa. Per ogni dito, un sensore di piegamento determina la posizione delle punte. La mano indossa inoltre un guanto con sensori tattili di pressione su dita, palmo così come ai lati esterni della mano robot. Questo permette di percepire la natura degli oggetti afferrati, e adattare di conseguenza la forza di presa, esattamente come le persone.
Rilevamento di oggetti tramite una rete neurale
Oltre ai sensori tattili, la mano ha una telecamera di profondità all'interno del polso in modo da poter rilevare visivamente gli oggetti. La mano robot può rilevare e afferrare una serie di oggetti, anche se questi sono parzialmente coperti. Dopo una fase di training, la mano può utilizzare i dati raccolti per valutare gli oggetti e distinguere, per esempio, quando afferrare e quando no. Le informazioni vengono elaborate da una rete neurale, che è stata istruita in anticipo con l'aiuto di Data Augmentation.
Applicazione robot mobile con braccio elettrico
Il BionicSoftHand 2.0 è combinato con un Ballbot mobile e un leggero braccio elettrico: il DynaArm. Il DynaArm può eseguire movimenti veloci e dinamici grazie alla sua progettazione intelligente tramite attuatori altamente integrati, e il peso complessivo è pari a solo un kilogrammo.
Utilizzo mobile e alimentazione indipendente
Gli sviluppatori del Ballbot hanno scelto un concetto di guida sofisticato: il robot si mantiene in equilibro su una palla. Questo significa che BionicMobileAssistant può muoversi liberamente in tutte le direzioni. L’alimentazione elettrica di tutti questi sistemi è montata a bordo: la batteria per braccio robot è collocata all’interno del corpo macchina; la cartuccia ad aria compressa per la mano pneumatica è installata nella parte superiore del braccio. Il robot, quindi, non solo è mobile, può anche lavorare autonomamente. L’algoritmo all’interno del computer centrale controlla inoltre i sistemi di movimento autonomo. Il robot si orienta in autonomia nelle tre dimensioni utilizzando due telecamere.
Diverse possibilità di applicazione
Il sistema è ideale per essere utilizzato come assistente personale, ad esempio come robot di servizio, come aiuto nel montaggio o per assistere i lavoratori nell'esecuzione di compiti ergonomicamente impegnativi o monotoni.
Potrebbe anche essere utilizzato in ambienti in cui le persone non possono lavorare a causa di pericoli o di accessibilità limitata. Ciò potrebbe includere lavori di manutenzione o riparazione, misurazioni di dati o ispezioni visive. È anche possibile immaginare robot mobili che svolgono il più semplice dei compiti in aree in cui vi è un maggiore rischio di infezione o a cui il personale non può accedere a causa di infezioni. Un possibile scenario potrebbe essere quello di un robot che porta bevande e cibo in tavola nei ristoranti o che consegna medicinali a pazienti ospedalieri o a persone che necessitano di cure in case di riposo.
Mano nella mano con le persone
Grazie al concetto modulare, il BionicSoftHand 2.0 può essere montato rapidamente anche su altri bracci robotizzati ed è facile da mettere in funzione. In combinazione con il BionicCobot o il BionicSoftArm, entrambi BionicConcepts di Festo, la pinza, forma un sistema robot completamente pneumatico in grado di lavorare a stretto contatto con le persone grazie alla sua intrinseca flessibilità e conformità.
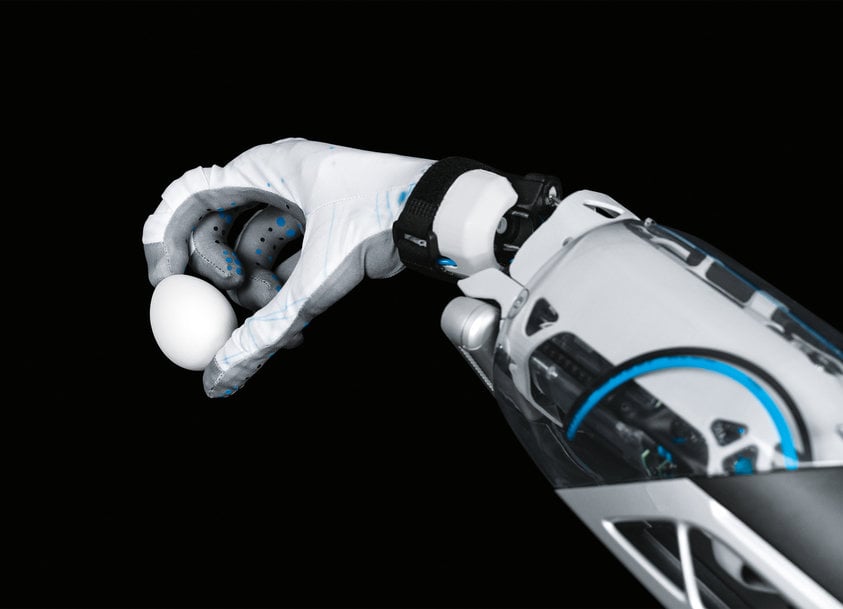
Il SoftHand 2.0 è in grado di percepire la natura dell'oggetto da afferrare e di adattare la sua forza di presa - proprio come fanno le persone.
www,festo.com
www,festo.com
